
周小虎 研究员/博导
国家优秀青年科学基金获得者
国家重点研发首席青年科学家
中国科学院自动化研究所
多模态人工智能系统全国重点实验室
地址:北京市海淀区中关村东路95号
Email:xiaohu.zhou@ia.ac.cn
最新消息
2023/12/19:黄德兴同学在多模态影像配准与融合方面的工作“Real-time 2D/3D registration via CNN regression and centroid alignment”被 IEEE Transactions on Automation Science and Engineering 接收,祝贺德兴!!!
2023/12/09:李浩同学荣获2023年度IEEE控制系统学会 (IEEE Control Systems Society) “IEEE CSS Graduate Collaboration Fellowship” ($10000) ,祝贺李浩!!!
2023/11/28:桂美将同学在触力觉仿生感知方面的工作“Highly interpretable representation for multi-dimensional tactile perception”被 IEEE Transactions on Medical Robotics and Bionics 接收,祝贺美将!!!
2023/08/16:李浩同学在机器人技能学习方面的工作“CASOG: Conservative Actor-critic with SmOoth Gradient for skill learning in robot-assisted intervention”被 IEEE Transactions on Industrial Electronics 接收,祝贺李浩!!!
2023/07/30:项天宇同学在脑肌调控方面的工作“Learning shared semantic information from multimodal bio-signals for brain-muscle modulation analysis”被 CCA-A 类会议 The 31st ACM International Conference on Multimedia (ACM 2023) 接收,祝贺天宇!!!
2023/07/26:姚泊先同学在介入操作力分析方面的工作“Accurate perception of manipulation force makes vascular intervention safer”荣获 The 2023 International Conference on Biomimetic Intelligence and Robotics & Medical Robotics Forum (ICBIR 2023)“Best Paper in Medical Robotics”,祝贺泊先!!!
2023/07/18:桂美将同学在在触力觉仿生感知分析方面的工作“Design and construction of a spherical magnet array for multi-dimensional tactile perception”荣获 The 2023 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2023)“Best Paper”,祝贺美将!!!
2023/05/08:桂美将同学荣获2023年度IEEE计算智能学会“IEEE CIS Graduate Student Research Grants” (该年度全球仅资助6人),祝贺美将!!!
2023/03/09:项天宇同学入选中科院自动化所第三批直博实验班,祝贺天宇!!!
2023/01/23:项天宇同学在动作分析方面的工作“Quantitative movement analysis using scaled information implied in monocular videos”被 IEEE Transactions on Medical Robotics and Bionics 接收,祝贺天宇!!!
2022/12/16:桂美将同学在触力觉仿生感知方面的工作“Soft magnetic skin's deformation analysis for tactile perception”被 IEEE Transactions on Industrial Electronics 接收,祝贺美将!!!
2022/11/09:祝贺天宇获得研究生国家奖学金!!!
2022/07/18:项天宇同学在步态分析方面的工作“Single camera based gait analysis method with scaled and image coordinate key-points”荣获 The 2022 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2022)“Best Paper”,祝贺天宇!!!
2022/01/20:桂美将同学在触力觉仿生感知方面的工作“Design and experiments of a novel Halbach-cylinder-based magnetic skin: a preliminary study” 被 IEEE Transactions on Instrumentation and Measurement 接收,祝贺美将!!!
2021/10/30:李浩同学入选中科院自动化所第二批直博实验班,祝贺李浩!!!
2021/09/09:桂美将同学入选中科院自动化所第一批直博实验班,祝贺美将!!!
研究领域
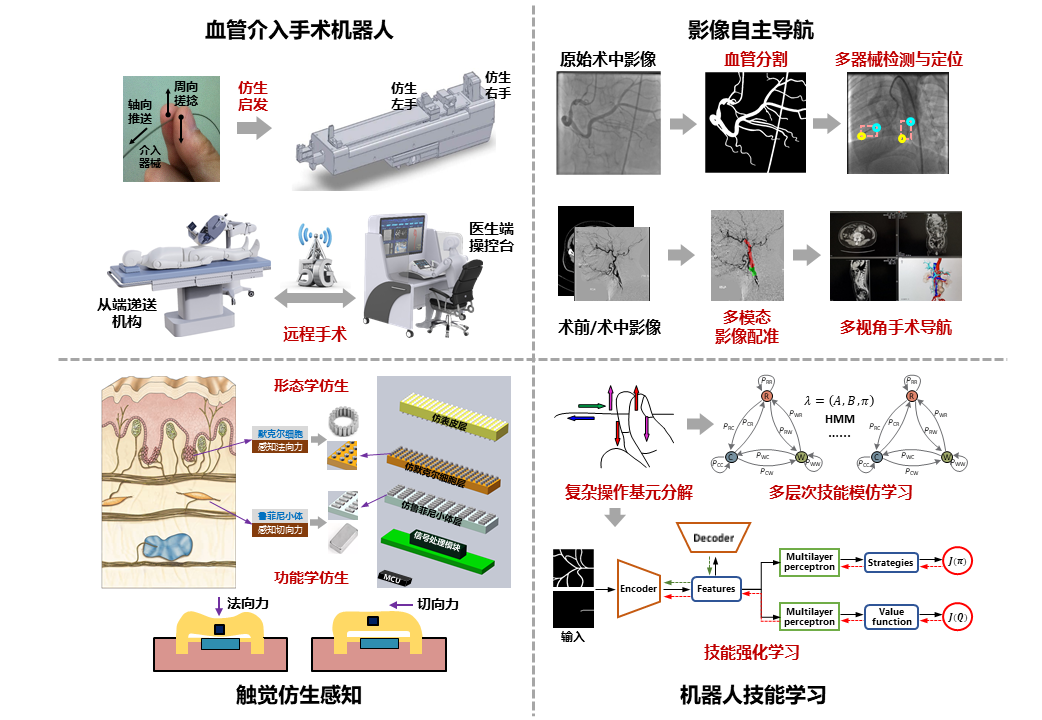
主要包括血管介入手术机器人、影像自主导航、触觉仿生感知、机器人技能学习,涉及机器人机械结构设计与控制、医学影像处理、强化学习、深度学习等。
招收控制类、机械类、计算机类、数学类、生物医学工程类等专业的
直博生(保送,学校和成绩不是主要考虑的因素,能拿到保研资格即可,只注重思维能力、动手能力、学习态度、做事是否踏实)
硕士生(少数民族骨干计划、退役士兵计划,符合条件的研二可以转博)
普博生(全日制)
实习生 (大三、大四或研一、研二,可实习 1 年以上,已有多名本科实习同学通过人工智能箐英班/夏令营/九推成功保研至自动化所)
常年招聘上述专业的博士后(符合条件的可解决北京户口);
有意者可将简历发送至我的邮箱 xiaohu.zhou@ia.ac.cn,期待能和优秀的你一起共同进步。
教育背景
中国科学院自动化研究所,控制理论与控制工程,工学博士
中南大学,自动化,工学学士
学术奖励
中国科学院“技术支撑人才”,2024
亚太神经网络学会 (APNNS) 青年学者奖 (Young Researcher Award),2023
中国科学院“特别骨干岗位”人才,2023
ROBIO 2023“Best Student Paper Award”
ICBIR 2023“Best Paper in Medical Robotics”
IEEE RCAR 2022/2023“Best Paper”
中国自动化学会优秀博士学位论文奖,2020
中国人工智能学会优秀博士学位论文奖,2020
中国科学院青年创新促进会会员,2020
中国科学院脑科学与智能技术卓越创新中心青年人才,2020
IEEE ICRA 2020“Best Paper in Medical Robotics”– Finalists
中国科学院首批“特别研究助理人才资助计划”,2020
中国科学院院长特别奖,2019
学术论文
目前已在IEEE TNNLS, TCYB, TMI, TBME, TMRB, ICRA, MICCAI, AAAI, IJCAI等机器人和人工智能领域顶级期刊和会议,发表学术论文 70 余篇,其中IEEE汇刊 20 篇。
- Learning skill characteristics from manipulations, IEEE Transactions on Neural Networks and Learning Systems, 2022. (第一作者, IF: 14.255)
- Surgical skill assessment based on dynamic warping manipulations, IEEE Transactions on Medical Robotics and Bionics, 2022. (第一作者, IF: 3.700)
- A multilayer and multimodal-fusion architecture for simultaneous recognition of endovascular manipulations and assessment of technical skills, IEEE Transactions on Cybernetics, 2020. (第一作者, IF: 19.118)
- An interventionalist-behavior-based data fusion framework for guidewire tracking in percutaneous coronary intervention, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020. (第一作者, IF: 11.471)
- Qualitative and quantitative assessment of technical skills in percutaneous coronary intervention: in vivo porcine studies, IEEE Transactions on Biomedical Engineering, 2020. (第一作者, IF: 4.756)
- Analysis of interventionalists’ natural behaviors for recognizing motion patterns of endovascular tools during percutaneous coronary interventions, IEEE Transactions on Biomedical Circuits and Systems, 2019. (第一作者, IF: 5.234)
- Real-Time 2D/3D Registration via CNN Regression and Centroid Alignment, IEEE Transactions on Automation Science and Engineering, 2023. (通讯作者, IF: 5.600)
- CASOG: Conservative Actor-critic with SmOoth Gradient for skill learning in robot-assisted intervention, IEEE Transactions on Industrial Electronics, 2023. (通讯作者, IF: 8.162)
- Design and experiments of a novel Halbach-cylinder-based magnetic skin: a preliminary study, IEEE Transactions on Instrumentation and Measurement, 2022. (通讯作者, IF: 5.332)
- Highly interpretable representation for multi-dimensional tactile perception, IEEE Transactions on Medical Robotics and Bionics, 2023. (通讯作者, IF: 3.700)
- Quantitative movement analysis using scaled information implied in monocular videos, IEEE Transactions on Medical Robotics and Bionics, 2023. (通讯作者, IF: 3.700)
- Soft magnetic skin's deformation analysis for tactile perception, IEEE Transactions on Industrial Electronics, 2022. (通讯作者, IF: 8.162)
- A unified framework for multi-guidewire endpoint localization in fluoroscopy images, IEEE Transactions on Biomedical Engineering, 2022. (通讯作者, IF: 4.756)
- SurgiNet: pyramid attention aggregation and class-wise self-distillation for surgical instrument segmentation, Medical Image Analysis, 2022. (第二作者, IF: 13.828)
- Real-time multi-guidewire endpoint localization in fluoroscopy images, IEEE Transactions on Medical Imaging, 2021. (第三作者, IF: 11.037)
- A real-time multi-functional framework for guidewire morphological and positional analysis in interventional X-ray fluoroscopy, IEEE Transactions on Cognitive and Developmental Systems, 2021. (第三作者, IF: 4.546)
- Pyramid attention recurrent networks for real-time guidewire segmentation and tracking in intraoperative X-ray fluoroscopy, Computerized Medical Imaging and Graphics, 2021. (第三作者, IF: 7.422)
- Single camera based gait analysis methods with scaled and image coordinate key-points, The 2022 IEEE International
Conference on Real-time Computing and Robotics (IEEE RCAR), 2022. (通讯作者, Best Paper Award)
- Accurate perception of manipulation force makes vascular intervention safer, The 2023 International Conference on Biomimetic, Intelligence and Robots (ICBIR), 2023. (通讯作者, Best Paper in Medical Robotics)
- Design and construction of a spherical magnet array for multi-dimensional tactile perception, The 2022 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR), 2023. (通讯作者, Best Paper Award)
- A multilayer-multimodal fusion architecture for pattern recognition of natural manipulations in percutaneous coronary interventions, IEEE International Conference on Robotics and Automation (ICRA), 2020. (第一作者, Best Paper Finalists)
- Learning shared semantic information from multimodal bio-signals for brain-muscle modulation analysis, The 31st ACM International Conference on Multimedia (MM), 2023. (通讯作者)
- A two-stage framework for real-time guidewire endpoint localization, The 22nd International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI), 2019. (第三作者)
- Vessel width estimation via convolutional regression, The 24th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI), 2021. (第三作者)
- BARNet: bilinear attention network with adaptive receptive fields for surgical instrument segmentation, The 29th International Joint Conference on Artificial Intelligence (IJCAI), 2021. (第四作者)
- Pyramid attention aggregation network for semantic segmentation of surgical instruments, The 34th AAAI Conference on Artificial Intelligence, 2020. (第四作者)
......
授权专利
目前已授权国际PCT专利 3 项、国家发明专利 23 项。
Catheter or guide wire manipulating device for vascular intervention, US9731096B2 (PCT)
Catheter or guide wire manipulating device based on two-point-clamping for vascular intervention, US10252029B2 (PCT)
Vascular interventional instrument control device with double guide wires or balloons, US11154689B2 (PCT)
血管介入器械搓捻装置及方法,ZL202111235746.7
基于仿生结构的力信息采集装置、系统及方法,ZL202110605003.8
应用于血管介入手术的力检测系统及方法,ZL202110605016.5
一种Y阀锁紧装置及导向装置,ZL202110159903.4
一种血管介入手术操作采集装置及方法,ZL201610266715.0
一种血管介入手术送丝机构的人机交互装置、系统及方法,ZL201610266180.7
基于X光图像的导丝分割和尖端点定位方法、系统和装置,ZL202011325897.7
基于双流边界感知的动脉瘤图像分析系统、方法和设备,ZL202110048844.3
血管介入手术中介入器械端点实时定位系统、方法、装置,ZL202011325869.5
基于多任务算法的实时多器械分割方法和系统,ZL202110815335.9
用于血管内动脉瘤手术的血管配准方法、系统和装置,ZL202011161676.0
......
科研项目
国家自然科学基金-优秀青年科学基金项目,血管介入手术机器人,200万元,项目负责人。
科技部-国家重点研发计划青年科学家项目,血管介入手术机器人精准感知与智能操控关键技术研究,200万元,项目负责人。
国家自然科学基金-联合基金重点项目,融合多导联心电信号多维度特征的心肌梗死早期诊断及精准定位研究,258万元,课题负责人。
科技部-国家重点研发计划,面向复杂病变的多器械协同递送血管介入手术机器人关键技术及应用研究,2553万元,子课题负责人。
国家自然科学基金-面上项目,基于脑-肌调控机制的机器人操作技能学习研究,50万元,项目负责人。
中国电子学会-腾讯Robotics X犀牛鸟专项研究计划,机器人仿生触觉:从感知到认知,45万元,项目负责人。
北京市自然科学基金-面上专项,心脑血管微创介入手术机器人的智能交互与安全操控研究,30万元,项目负责人。
国家自然科学基金-青年科学基金项目,面向智能辅助的血管介入手术机器人技能学习研究,24万元,项目负责人。
中国科学院-特聘研究骨干(人才类资助),血管介入手术机器人,150万元,项目负责人
中国科学院-青年创新促进会会员资助项目(人才类资助),血管介入手术机器人视觉感知与导航,80万元,项目负责人。
中国科学院-特别研究助理资助项目(人才类资助),血管介入手术机器人触觉感知与反馈,80万元,项目负责人。
学术服务
北京人工智能学会,理事
国家自然科学基金委员会/北京市科学技术委员会,评审专家
中国自动化学会自适应动态规划与强化学习专业委员会,委员
中国计算机学会智能机器人专业委员会,委员
中国人工智能学会智能机器人专业委员会,委员
The 7th Asian Conference on Artificial Intelligence Technology (ACAIT 2023), Regional Chair of Beijing
IEEE International Conference on Advanced Robotics and Mechatronics (ARM 2022/2023), Associate Editor
指导学生
王 晨,控制理论与控制工程(081101),本科毕业于北京化工大学,免试保送进入自动化所。
姚泊先,控制理论与控制工程(081101),本科毕业于清华大学,免试保送进入自动化所(荣获ICBIR 2023“Best Paper in Medical Robotics”)。
曹 岳,控制理论与控制工程(081101),本科毕业于哈尔滨工业大学(威海)。
黄德兴,控制理论与控制工程(081101),本科毕业于北京邮电大学,免试保送进入自动化所。
于 喆,控制理论与控制工程(081101),本科毕业于中国科学院大学。
项天宇,控制理论与控制工程(081101),本科毕业于同济大学,免试保送进入自动化所(荣获硕士生国家奖学金、IEEE RCAR 2022“Best Paper”,入选直博实验班)。
李 浩,控制理论与控制工程(081101),本科毕业于清华大学,免试保送进入自动化所(荣获IEEE CSS Graduate Collaboration Fellowship,入选直博实验班)。
桂美将,控制理论与控制工程(081101),本科毕业于中国地质大学(北京),免试保送进入自动化所(荣获博士生国家奖学金、IEEE计算智能学会“IEEE CIS Graduate Student Research Grants”、IEEE RCAR 2023“Best Paper”,入选直博实验班)。
王晋利,机械工程(085201),与中国矿业大学(北京)机电与信息工程学院曾纲教授联合指导。